Identifying the components
The three types of components we're going to be interfacing with on the car are the Electronic Speed Controller (ESC), receiver, and servo(s).
Most RC cars only have one servo (to steer the wheels), but sometimes multiple servos exist (for example, four-wheel steering). We'll worry about the servo later. After all, we don't need to actually get at the servo. We just need its plug (which will be attached to the receiver). Servo wires are very easily identified. They are always three wires and are either colored in a white-red-black or yellow-red-black color scheme.
The ESC is also easily identified as it is where the main power lead (plug for the battery) is attached. It regulates the power from the battery to the drive motor(s), and thus controls the speed of the motor. Should you elect to increase the power of a motor, you should keep in mind the following three things:
- Battery power should be weighed against the ESC: For instance, you don't want to overpower an ESC rated for 2S or 3S batteries (2-cell or 3-cell li-po batteries) with a 4S battery. This can literally result in a fire.
- The type of motor: Brushed motors (motors using brushes to change the polarity of the electromagnets within the motor) cannot use brushless ESCs. Conversely, brushless motors (motors that rely on the ESC to change the polarity of the electromagnets within the motor) cannot use brushed ESCs.
- The power draw of the motor: Using a small ESC on a huge motor can (and will) result in a fire. I once put a huge motor in an RC Spitfire, and forgot to change the ESC. It came down in a ball of flames.
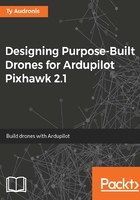
In the following image, you can see the ESC and the receiver box for the Rustler (after we removed the shell). You can also see the white-red-black servo control wires:
